
加载中...

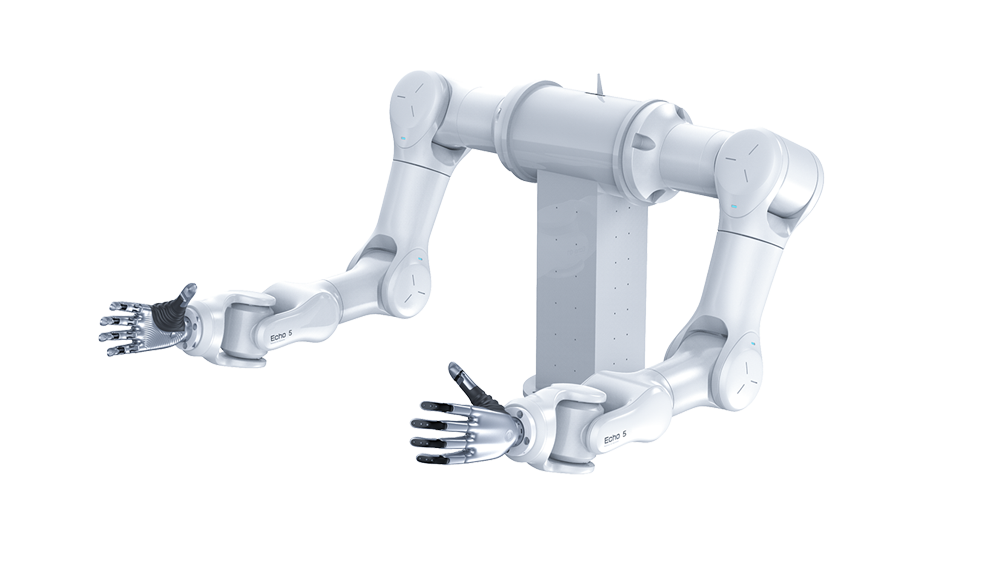
作为具身智能核心执行部件之一,华沿七轴人形手臂可为四足、人形等具身平台提供高效集成选择,目前拥有Echo和HY两大系列,共六款型号,负载覆盖3kg至15kg,适用于各类复杂生产场景。








力控精度达到≤0.02N·m、力控带宽≥100Hz、末端接触力精度达到0.1N,随时感知微小外力,实现毫秒级柔顺响应。

轻量化设计,能在四足、人形等各类具身平台上稳定运行

最小过线直径15mm,可同时穿行千兆网线/GMSL线缆 + 电源线 + 信号线

集成本地AI服务器、原生支持ROS2,具备边缘决策能力,能自主感知偏移、判断异常并实时调整轨迹

1台控制器可以控制4条人形手臂,极致小型化设计,节省空间、易于集成,更适合人形机器人紧凑结构。

七轴自由度设计,十字共面交叉构型,动作仿人灵活,狭小空间避障从容,胜任精细复杂任务
灵巧先锋
效率担当
性能标杆

异面十字交叉构型,工作空间更大、奇异性更少,结构刚度更高
精密大师
全能手

大力士
 |
 |
 |
 |
 |
 |
 |
|
型号 |
Echo 3 | Echo 5 | Echo 15 | HY 3 | HY 7 | HY 15 |
| 自由度 | 7 | 7 | 7 | 7 | 7 | 7 |
| 额定负载 | 3kg | 5kg | 15kg | 3.5kg | 7kg | 15kg |
| 重复定位精度 | ±0.02mm | ±0.03mm | ±0.05mm | ±0.02mm | ±0.03mm | ±0.05mm |
| 人形手腕构型 | 十字共面构型 | 十字共面构型 | 十字共面构型 | 十字异面构型 | 十字异面构型 | 十字异面构型 |
| 本体重量 | <8kg | <12kg | <22kg | <8kg | <12kg | <22kg |
| 单臂展 | 555mm | 605mm | 850mm | 625mm | 670mm | 850mm |
| TCP最大速度 | ≥2m/s | ≥2m/s | ≥2m/s | ≥2m/s | ≥2m/s | ≥2m/s |
| 运动范围 |
J1、J3、J5:±360° |
J1、J3、J5:±360° |
J1、J3、J5:±360° |
J1、J3、J5:±360° |
J1、J3、J5:±360° |
J1、J3、J5:±360° |
| 手臂末端相机(选配项) | 内走线,无外漏 | |||||
| 手臂末端接口 | 支持RS485、EtherCAT | |||||
| 通迅方式 | EtherCAT | |||||
| 扭矩传感器 | 各关节标配 | |||||
| 制动方式 (抱闸控制) | 各关节标配 | |||||
| 输入电源 | 48V DC(±15%) | |||||
| 噪音 | ≤45 dB | |||||
| 防护等级 | IP54 | |||||
| 认证指标 | CE认证、ISO/TS15066,13849-1PLd(Cat.3),ENISO12100:2010 | |||||




















